Non-Invasive BCIs as Treatment
What is a "non-invasive BCI?"
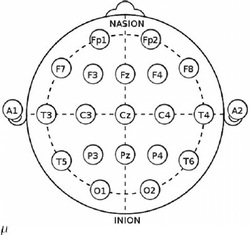
The term “non-invasive Brain-Computer Interfaces” encompasses all the technology that allows for brain-to-computer stimulation without needing to penetrate the skull. Indeed, most non-invasive Brain-Computer Interfaces, or BCIs, simply rely on electrodes that are strategically placed onto certain areas of the scalp in order to record brain activity. Amongst the main technologies used in the process of non-invasive BCIs are electroencephalogram (EEG), functional magnetic resonance imaging (fMRI), magneto-encephalography (MEG), near infrared spectroscopy (NIRS), and functional transcranial doppler sonography (fTCD). Despite there being many neuroimaging techniques, the first and most commonly used thus far has been EEG. Indeed, because it is easier to use, relatively inexpensive, and offers higher temporal resolution, most non-invasive BCI research is done using EEGs. Having been invented almost a century ago, EEG has significantly evolved to better read brain activity, namely in terms of the positioning of electrodes. In order for the EEG to accurately relay the brain’s activity to the computer, electrodes need to be strategically placed on the subject’s scalp. Previously, the Federation of Societies for EEG had developed the International 10-20 system, which placed twenty-something electrodes on an axis with an interval of 10% or 20% of a predetermined constant distance between each electrode. Today, though, caps or nets containing somewhere around 256 electrodes are simply placed on the subject’s scalp to better record the brain's electrical activity, and relay it back to the computer.
Strengths and Weaknesses of the technology
 BCI controlled wheelchair
BCI controlled wheelchair
Non-invasive Brain Computer interfaces have their limitations in terms of how much they can relay between the brain and the computer. In the previous section (see Invasive BCIs), we saw that, by using invasive procedures, we can better control devices such as robotic arms, because the deeper penetration of the electrode offers more accuracy and stability. However, non-invasive BCIs offer many other benefits. No penetration into a subject’s scalp and cortex means not only much more comfort for the subject, but also less risk, lower cost, and easier application. Of course, several problems do arise from the use of non-invasive BCIs that don’t have anything to do with the quality or strength of the brain activity’s readings—problems that have yet to fully be dealt with. Indeed, for many of the applications of non-invasive BCIs, it is still impossible, or rather bothersome, to use the technology without a full laboratory, seeing as how the electrodes take a lot of time to put on, and amplifiers necessary to read the brain’s activity are rather costly. This means that the use of non-invasive BCIs is still somewhat limited to the research labs. However, recent successful experiments, such as the brain-actuated wheelchair, show that the technology is evolving as to soon reach the point of commercialization.
Non-Invasive procedures

Humanoid Robots
In 1999, a non-invasive Brain-Computer interface used EEG to aid a quadriplegic regain a small amount of movements in his hands. Since then, BCIs have evolved, and treatments have become more complex. In 2008, for example, a non-invasive BCI allowed for subjects to control humanoid robots using nothing but their minds—and extremely sophisticated technology. A study published in the Journal of Neural Engineering outlined the process of the experiment, and the complexity of the project. The subject of the experiment chooses which object the robot should pick up, and where the robot should then place the object, by staring at the object or location of their choice who’s borders are flashing in a random order. The computer uses the P3, the visually evoked EEG response, to determine which object the subject is looking at based on the flashing. The study concludes that non-invasive brain signals are an extremely effective way to control a complex machine like the robot used in the experiment, despite what is said about the limitations of the technology. What is fascinating about this is that, if the technology advances enough to becomes marketable and easy to use without needing to be in a lab, disabled individuals that cannot move on their own could use such a robot to greatly facilitate their lives without having to get surgery.
Brain-to-Brain computer interfaces
But Brain-to-Computer interfaces have also started opening a gateway for many other types of interfaces, including a hybrid of a few of them, the Brain-to-Brain interface. Indeed, researchers have begun experimenting with BBIs, and the technology that could possibly lead to neural coupling between two brains. This technology would require the use of BCIs, of Computer-Brain interfaces (CBIs) and focused ultrasounds (FUS). So far, testing has only been done between humans and rats, but human-to-human testing isn’t too far ahead. To see how the process works, check out the video at the bottom of the page. The video illustrates the human-to-rat experiment, in which an average subject watches a screen with a flashing object on it while hooked up to a computer with electrodes that record the brain activity. Meanwhile, the rat, too, is hooked up to the computer, and, as you can see, moves its tail every time the subject’s mind is stimulated.
In 1999, a non-invasive Brain-Computer interface used EEG to aid a quadriplegic regain a small amount of movements in his hands. Since then, BCIs have evolved, and treatments have become more complex. In 2008, for example, a non-invasive BCI allowed for subjects to control humanoid robots using nothing but their minds—and extremely sophisticated technology. A study published in the Journal of Neural Engineering outlined the process of the experiment, and the complexity of the project. The subject of the experiment chooses which object the robot should pick up, and where the robot should then place the object, by staring at the object or location of their choice who’s borders are flashing in a random order. The computer uses the P3, the visually evoked EEG response, to determine which object the subject is looking at based on the flashing. The study concludes that non-invasive brain signals are an extremely effective way to control a complex machine like the robot used in the experiment, despite what is said about the limitations of the technology. What is fascinating about this is that, if the technology advances enough to becomes marketable and easy to use without needing to be in a lab, disabled individuals that cannot move on their own could use such a robot to greatly facilitate their lives without having to get surgery.
Brain-to-Brain computer interfaces
But Brain-to-Computer interfaces have also started opening a gateway for many other types of interfaces, including a hybrid of a few of them, the Brain-to-Brain interface. Indeed, researchers have begun experimenting with BBIs, and the technology that could possibly lead to neural coupling between two brains. This technology would require the use of BCIs, of Computer-Brain interfaces (CBIs) and focused ultrasounds (FUS). So far, testing has only been done between humans and rats, but human-to-human testing isn’t too far ahead. To see how the process works, check out the video at the bottom of the page. The video illustrates the human-to-rat experiment, in which an average subject watches a screen with a flashing object on it while hooked up to a computer with electrodes that record the brain activity. Meanwhile, the rat, too, is hooked up to the computer, and, as you can see, moves its tail every time the subject’s mind is stimulated.
Hope for the future?
In 2011, Hubert Cecotti wrote a paper in which he analyzed the issue of why researches hadn’t yet perfected the technology that would allow people with locked-in syndrome to successfully communicate with others around them. To Cecotti, BCIs were first created in order to develop the technology necessary for spellers, and it was baffling to him that so little progress had been made thus far. Throughout the paper, he explored the different ways in which researchers have gone about using non-invasive BCIs to allow people to spell by simply using their brain, and mentioned the use of spellers based on P3s, spellers based on SSVEP, and spellers based on motor imagery. Unfortunately, Cecotti concluded that there were too many constraints in the research that made it extremely hard to determine which approach worked best. He mentioned the paradox in the advancement of BCIs, and the frustration felt by many due to broken promises in terms of where the technology would be. Still, all of this does not leave us devoid of hope, as Cecotti wrote himself that next generation BCIs would most likely find a way to combine the different approaches in order to create a more stable and accurate speller. Although the research is moving at a seemingly slow pace, every day new developments are made, bringing us one step closer to having marketable BCIs. Today, it is more a question of “when” than of “if” the technology will ever become marketable. Still, many other questions arise from this, such as whether or not researches are really putting in the time, or if . Indeed, many researchers have already begun to think of BCIs in terms of enhancement rather than treatment despite it seeming extremely frivolous to move on to the next phase when we have yet to perfect the technology that is meant to help and save lives. To learn more on enhancements, visit the “BCIs as enhancement” page.
